

对于步进电机✿ღღ◈,每输入一个脉冲信号优发国际随优而动一触即发✿ღღ◈,转子就转动一个角度或前进一步✿ღღ◈。其输出的角位移或线位移与输入的脉冲数成正比优发国际随优而动一触即发✿ღღ◈,转速与脉冲频率成正比✿ღღ◈。因此✿ღღ◈,步进电动机又称脉冲电动机✿ღღ◈。
双极步进电机有四根电线和两个线圈✿ღღ◈。要使其旋转✿ღღ◈,需要通过线圈发送电流✿ღღ◈。每根电线都需要能够被高低驱动✿ღღ◈。以下是如何驱动电流使步进电机旋转✿ღღ◈。
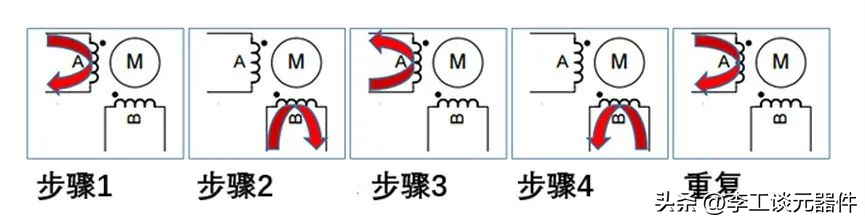
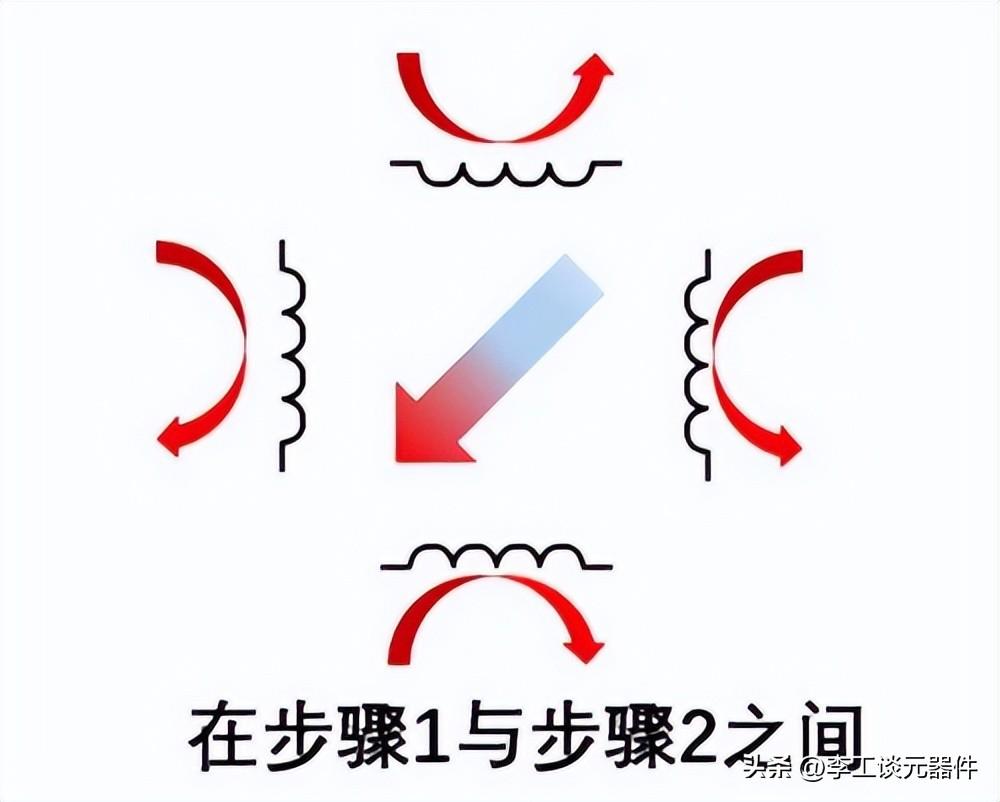
要理解为什么这样做✿ღღ◈,请考虑一个只有四个步骤的简单步进电机lusirapp软件下载✿ღღ◈。在第一阶段✿ღღ◈,它将磁体与第一线圈对齐✿ღღ◈。下一步将磁体旋转90度✿ღღ◈。通过第一线圈反向发送电流会反转磁体极性✿ღღ◈。相反的线圈被连接✿ღღ◈,但相对于中心磁体产生相反的磁场✿ღღ◈。

当然✿ღღ◈,大多数步进电机的步数超过4步✿ღღ◈。你的标准步进电机每转200步✿ღღ◈。以这种方式旋转电机称为全步进✿ღღ◈。一旦你完成了全步工作lusirapp软件下载lusirapp软件下载✿ღღ◈,半步是非常简单的✿ღღ◈。你可以同时通过两个线圈发送电流✿ღღ◈,这将使分辨率加倍✿ღღ◈。
步进电机驱动器也可以使用微步进优发国际随优而动一触即发✿ღღ◈,微步进调节通过线圈的电流✿ღღ◈。典型的电机控制器可以在每一个完整的步骤中执行16个微步骤✿ღღ◈。一些芯片负责调制电流✿ღღ◈,但较旧的芯片需要为其驱动的步进电机“调谐”✿ღღ◈。
微步进进一步将整个步进划分为256微步进lusirapp软件下载✿ღღ◈,使典型的200步进电机变成51200步进电机✿ღღ◈!微步进还降低了电机的噪音✿ღღ◈,使其运行更平稳✿ღღ◈、更高效✿ღღ◈。
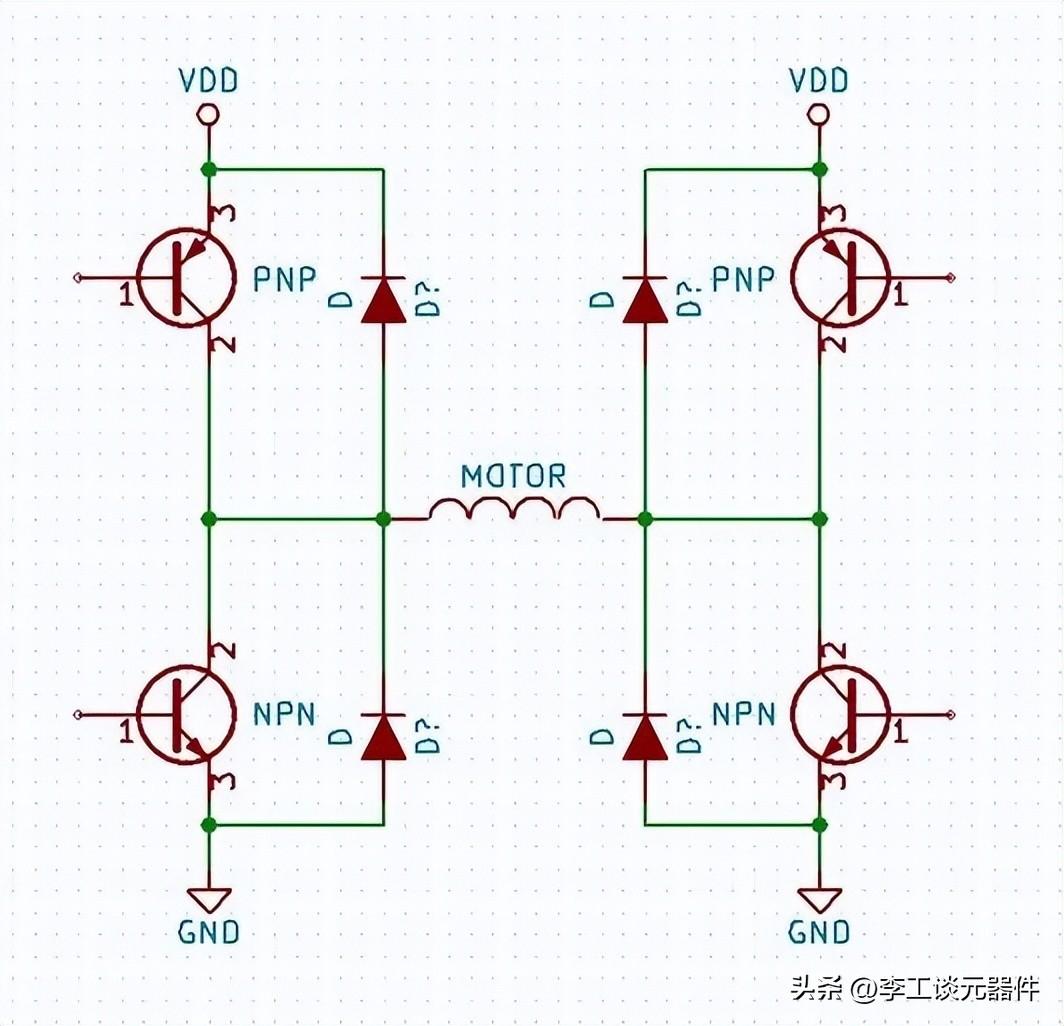
控制通过绕组的电流的最常见设置是使用所谓的H桥✿ღღ◈。它是一组四个晶体管✿ღღ◈,可以将每条导线拉高或拉低✿ღღ◈。你也可以用MOS管代替晶体管✿ღღ◈,但布线会有点不同✿ღღ◈。该图显示了如何通过H桥向任意方向发送电流✿ღღ◈。你只需要打开路径中的晶体管✿ღღ◈。
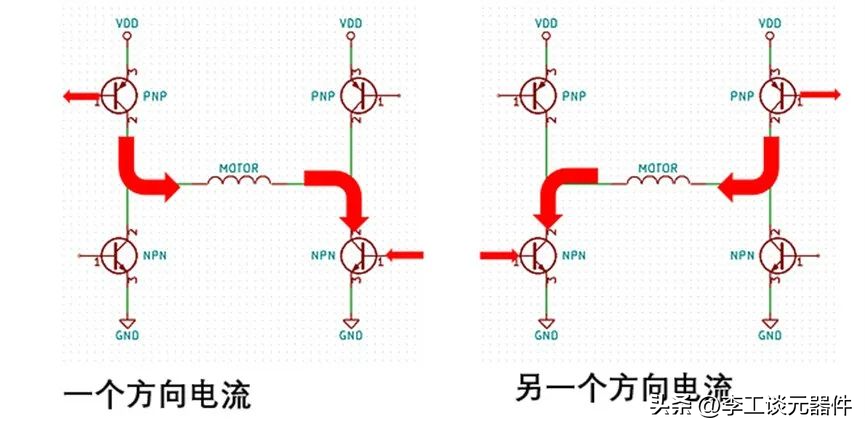
你必须确保同一侧的两个晶体管不能同时导通✿ღღ◈。这将通过提供从电源到接地的低电阻路径使电路短路✿ღღ◈。你还应注意✿ღღ◈,晶体管可能需要一段时间才能从接通切换到断开✿ღღ◈。除非你知道自己在做什么✿ღღ◈,否则不建议快速切换通过线圈的电流✿ღღ◈。
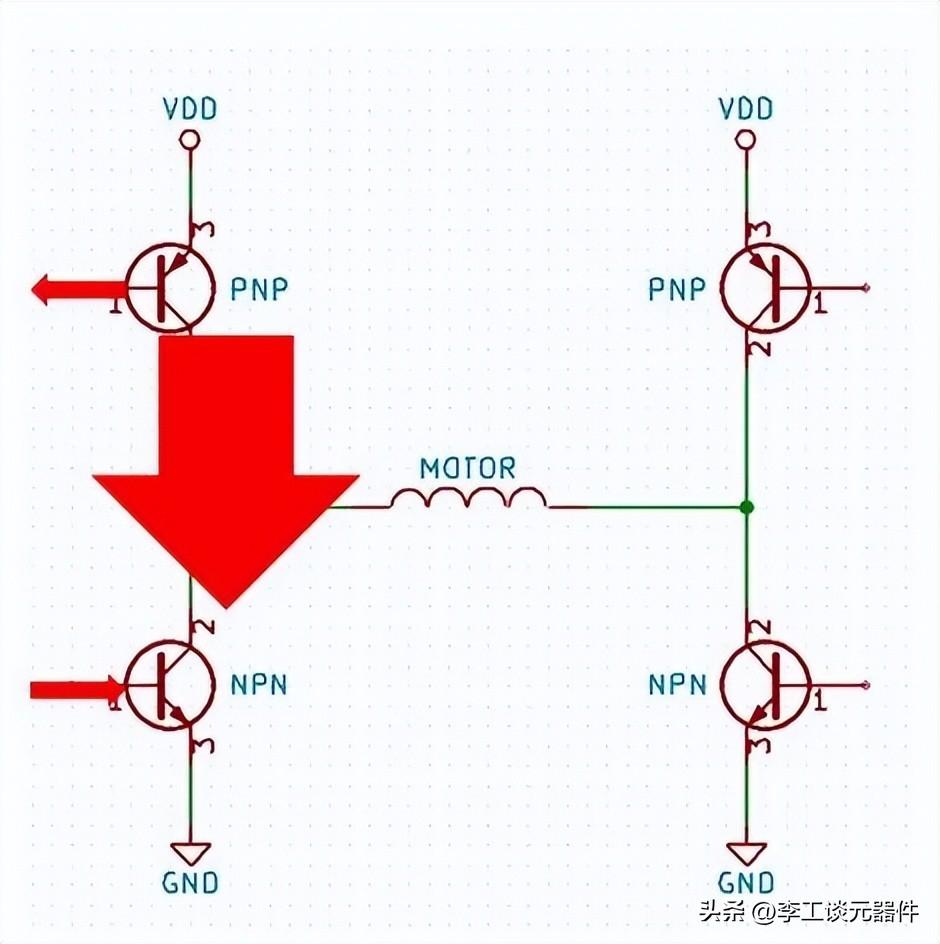
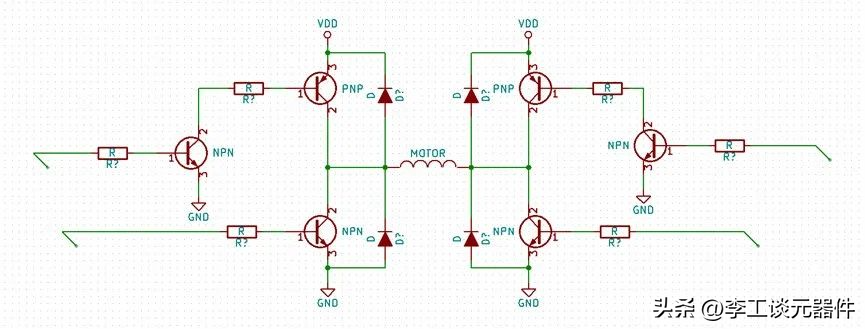
这将防止电机产生高压✿ღღ◈,这可能会破坏晶体管甚至驱动器✿ღღ◈。如果驱动步进电机的电压高于MCU输出的电压✿ღღ◈,则需要添加另一个晶体管来控制PNP晶体管✿ღღ◈。

当你打开额外的NPN晶体管时✿ღღ◈,它将允许电流从PNP晶体管的基极(引脚1)流出✿ღღ◈,从而打开它✿ღღ◈。现在所需要的只是所有NPN晶体管基极上的限流电阻lusirapp软件下载✿ღღ◈。
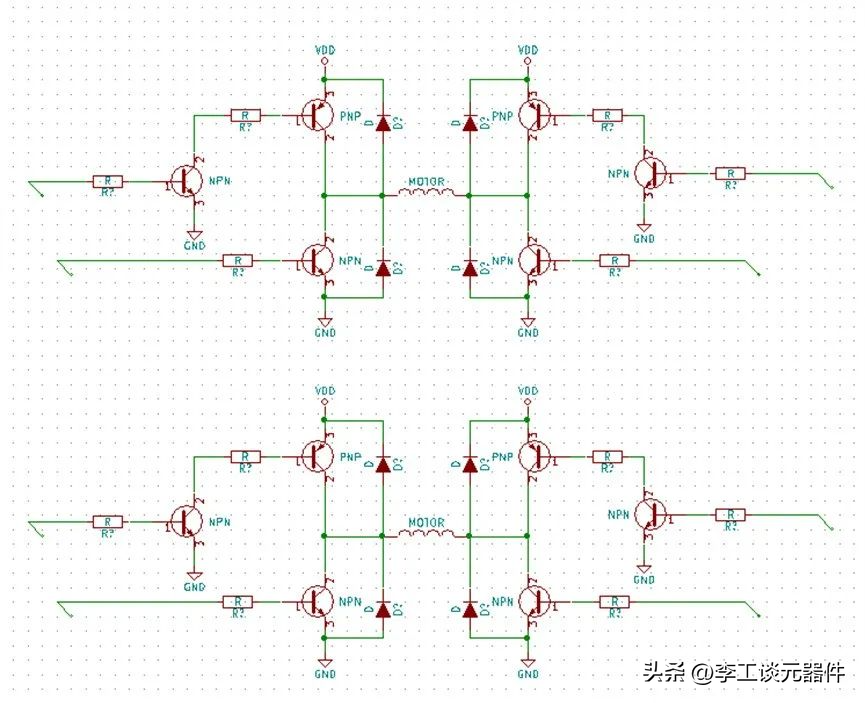
现在✿ღღ◈,你可以很好地计算所需的组件✿ღღ◈。使用双H桥并不是驱动步进电机的唯一方法✿ღღ◈。你也可以购买步进电机驱动器✿ღღ◈,它将内置双H桥(尽管驱动器通常使用MOS管和其他技巧)✿ღღ◈。如果你想减少BOM数量(有时获得更多功能)优发国际随优而动一触即发✿ღღ◈,我建议你看看步进电机驱动器✿ღღ◈。你需要查看数据表以了解芯片提供的功能✿ღღ◈。一些芯片只提供晶体管和二极管✿ღღ◈,而其他芯片则完全控制通过线圈的电流✿ღღ◈。
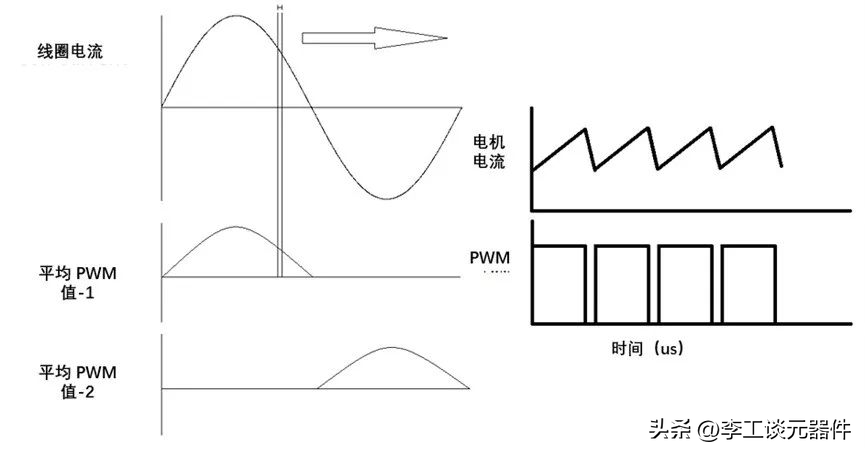
微步进包括向晶体管发送脉宽调制信号✿ღღ◈。这是一种控制电机线圈电流的简单方法✿ღღ◈。预先选择的PWM值被放置在正弦查找表中✿ღღ◈。典型地✿ღღ◈,选择20-40kHz的PWM频率✿ღღ◈。任何低于20千赫的声音✿ღღ◈,人类耳朵都能听到✿ღღ◈。
频率保持低于40kHz以提高效率并减少晶体管中的功耗✿ღღ◈。当PWM信号为高时✿ღღ◈,电流流过晶体管优发国际随优而动一触即发✿ღღ◈。当PWM信号低时✿ღღ◈,电流流过二极管✿ღღ◈。这是一个非常粗糙的微步进实现✿ღღ◈,但它给出了它如何工作的一般概念✿ღღ◈。使用MOS管的电机驱动器可以控制电机电流降低或衰减的速度✿ღღ◈。驱动器的电流波形更像这样✿ღღ◈:
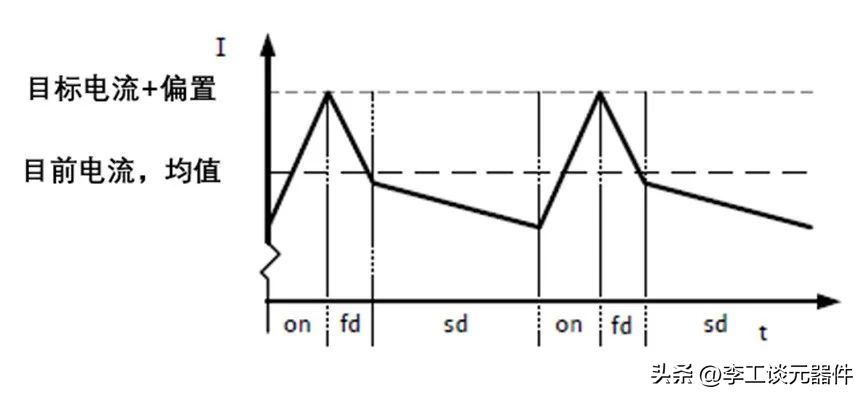
必须为其驱动的电机手动优化快速衰减周期和慢速衰减周期✿ღღ◈。一些新芯片会根据其感应到的电流自动调整衰减周期✿ღღ◈,但旧芯片可能需要优化(或调整)✿ღღ◈。
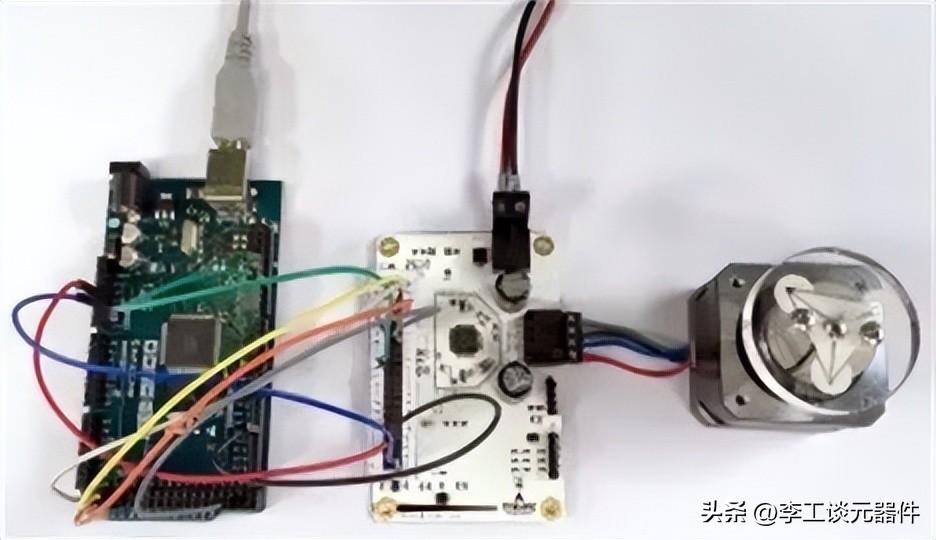
实例✿ღღ◈:使用控制板Arduino Mega控制步进电机驱动板TMC5130-EVAL来驱动步进电机✿ღღ◈。

Arduino Mega 2560是一款基于ATmega2560的微控制器板✿ღღ◈。它有54个数字输入/输出引脚(其中15个可以用作PWM输出)✿ღღ◈、16个模拟输入✿ღღ◈、4个UART(硬件串行端口)✿ღღ◈、一个16 MHz晶体振荡器✿ღღ◈、一个USB连接优发国际随优而动一触即发✿ღღ◈、一个电源插座✿ღღ◈、一个ICSP头和一个复位按钮✿ღღ◈。
它包含支持微控制器所需的一切✿ღღ◈;只需用USB电缆将其连接到计算机✿ღღ◈,或用交流到直流适配器或电池为其供电即可开始使用✿ღღ◈。
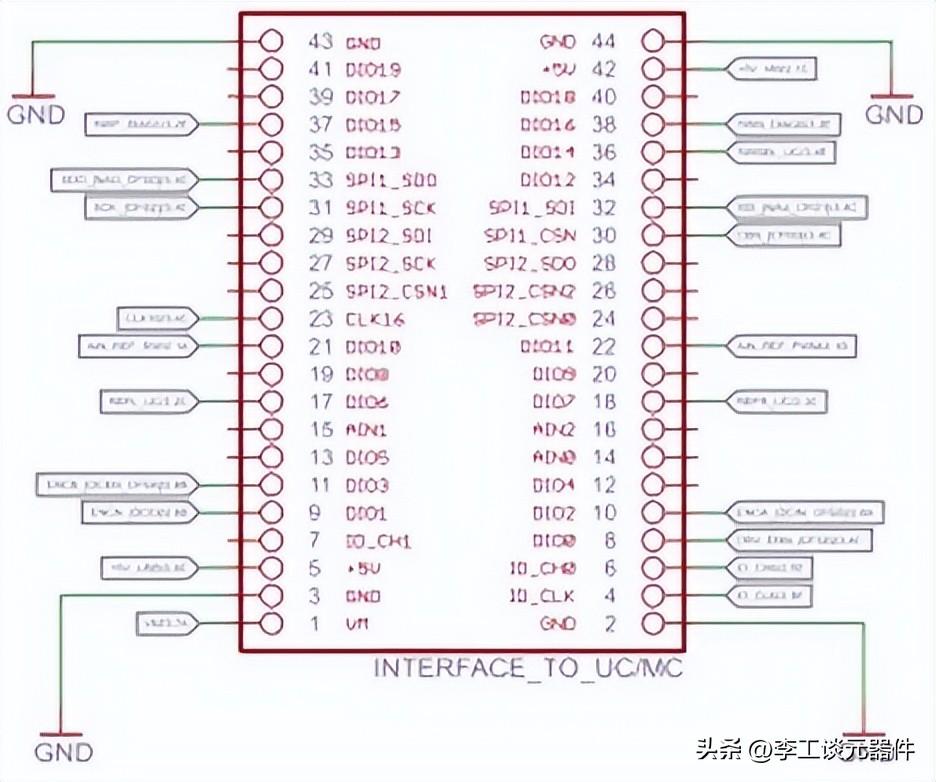
TMC5130是一个完全集成的步进电机驱动器和控制器系统✿ღღ◈,允许从任何微控制器远程控制步进电机✿ღღ◈。它在硬件上实现了所有实时关键任务✿ღღ◈。一旦配置✿ღღ◈,电机可以通过给出目标位置✿ღღ◈、命令归航序列或给出目标速度来驱动✿ღღ◈。
使用TMC5130的好处包括✿ღღ◈:易于使用✿ღღ◈,使用256微步的电机精度✿ღღ◈,低电机噪声(无噪声隐藏斩波器)✿ღღ◈,无传感器失速检测(stallGuard2)✿ღღ◈,无阶跃损耗✿ღღ◈,dcStep和coolStep✿ღღ◈、UART或SPI控制接口的高效率✿ღღ◈,高电压范围✿ღღ◈,小形状因数✿ღღ◈,以及低部件数量✿ღღ◈。
如果Arduino是5V控制板lusirapp软件下载✿ღღ◈,则必须将TMC5130-EVAL上的一个电阻从位置R3重新定位到R8✿ღღ◈。这将TMC5130的逻辑电平设置为+5V✿ღღ◈。
下面的Arduino代码不需要任何额外的库✿ღღ◈。SPI库是Arduino IDE附带的✿ღღ◈。该程序初始化TMC5130并执行简单的移动到位置周期✿ღღ◈。它将根据步进电机的接线全步进电机向一个方向旋转10转✿ღღ◈,向另一个方向旋转10转✿ღღ◈。请使用TMC5130数据表或TMCL IDE作为不同寄存器的参考✿ღღ◈。工业自动化✿ღღ◈,优发国际娱乐✿ღღ◈!优发国际✿ღღ◈,优发✿ღღ◈,优发88官网


















 浙公网安备33060402000406号
浙公网安备33060402000406号